 long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. The SSRMS is part of the payload on mission STS-100, scheduled to launch April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC.")
WIKIARCHIVES.SPACE
The Human Spaceflight Archive

























































Information
- Taken in
- Kennedy Space Center
- Author
- NASA
- Description
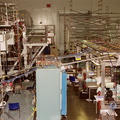
- Workers on either side of the payload canister oversee the lowering of the Canadian robotic arm, SSRMS, and its pallet inside. The arm is 57.7 feet (17.6 meters) long when fully extended and has seven motorized joints. It is capable of handling large payloads and assisting with docking the Space Shuttle. The SSRMS is self-relocatable with a Latching End Effector, so it can be attached to complementary ports spread throughout the Station’s exterior surfaces. The SSRMS is part of the payload on mission STS-100, scheduled to launch April 19 at 2:41 p.m. EDT from Launch Pad 39A, KSC.
- Created on
- শুক্রবার 30 মার্চ 2001
- Albums
-
Locations / OSM-4.915832801313164
US SPACE PROGRAM / SPACE SHUTTLE / MISSIONS / STS-100 / Rocket preparation
- Source link
- https://science.ksc.nasa.gov/gallery/photos/2001/captions/
- Visits
- 42
- Rating score
- no rate
- Rate this photo
- License
- CC BY-NC
- Modified by WikiArchives
- No (original)
- Downloads
- 1
Powered by Piwigo