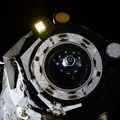
, watch the rollout of the ULA Atlas V 541 rocket, carrying NASA’s Mars Perseverance rover and Ingenuity helicopter, as it rolls along to the launch pad at Space Launch Complex 41 at Cape Canaveral Air Force Station on July 28, 2020. First motion was at 10:24 a.m. EDT. Launch of the Mars 2020 mission is scheduled for July 30. The rover is part of NASA’s Mars Exploration Program, a long-term effort of robotic exploration of the Red Planet. The rover will search for habitable conditions in the ancient past and signs of past microbial life on Mars. The Launch Services Program at Kennedy is responsible for launch management.")
WIKIARCHIVES.SPACE
The Human Spaceflight Archive




































































































































































Information
- Taken in
- Kennedy Space Center
- Author
- NASA/Ben Smegelsky
- Description
- NASA Administrator Jim Bridenstine, at right, and Tory Bruno, CEO of United Launch Alliance (ULA), watch the rollout of the ULA Atlas V 541 rocket, carrying NASA’s Mars Perseverance rover and Ingenuity helicopter, as it rolls along to the launch pad at Space Launch Complex 41 at Cape Canaveral Air Force Station on July 28, 2020. First motion was at 10:24 a.m. EDT. Launch of the Mars 2020 mission is scheduled for July 30. The rover is part of NASA’s Mars Exploration Program, a long-term effort of robotic exploration of the Red Planet. The rover will search for habitable conditions in the ancient past and signs of past microbial life on Mars. The Launch Services Program at Kennedy is responsible for launch management.
- Created on
- Tuesday 28 July 2020
- Albums
- US SPACE PROGRAM / PROBES / MARS / PERSEVERANCE / Rocket preparation
- Source link
- https://www.flickr.com/photos/nasakennedy/albums/72157690163379683
- Visits
- 100
- Rating score
- no rate
- Rate this photo
- License
- CC BY-NC-ND
- Modified by WikiArchives
- No (original)
- Downloads
- 0
EXIF Metadata
Canon Canon EOS 5D Mark IV
- Make
- Canon
- Model
- Canon EOS 5D Mark IV
- DateTimeOriginal
- 2020:07:28 10:02:43
- ApertureFNumber
- f/22.0
Powered by Piwigo